AI Automatisering
6-DOF Hand Tracking Control
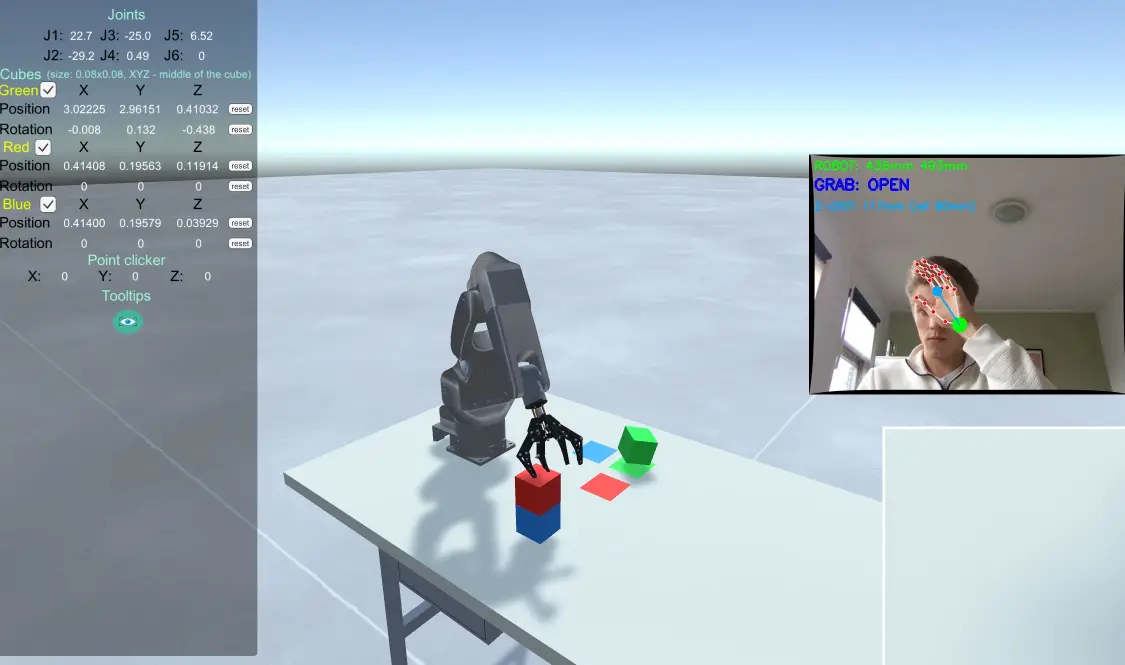
Dit project koppelt computer vision aan robotica door de bewegingen van een menselijke hand te vertalen naar commando’s voor een Faze4 robotarm.
De Uitdaging
Het realiseren van vloeiende en nauwkeurige trajecten op basis van videobeelden.
Onze Oplossing
Gebruik van MediaPipe voor hand-tracking, PyBullet voor inverse kinematics en een EMA-filter voor smoothing.
Impact & Resultaten
6-DOF Vrijheid
Kwaliteit gewaarborgd
Real-time Flow
Kwaliteit gewaarborgd
Interactie
Kwaliteit gewaarborgd
Technische Details
Technologie Stack
MediaPipe
PyBullet
OpenCV
Unity
Project Status
Voltooid & Beheerd